Abstract
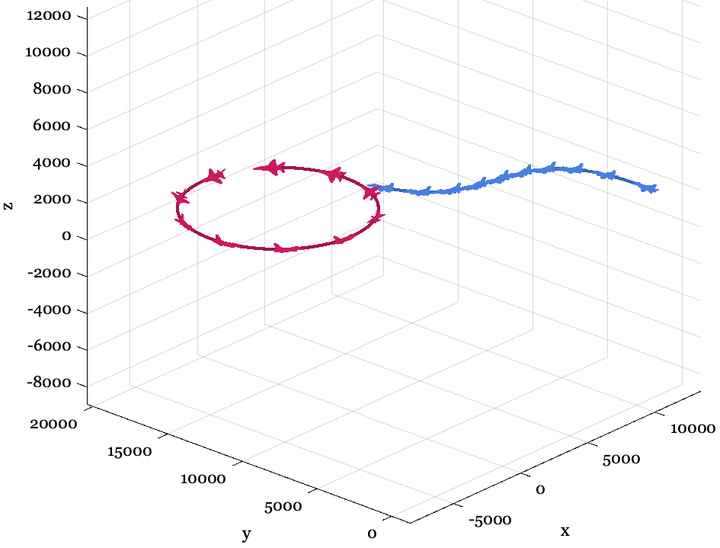
In this paper, the interception of a target vehicle is presented utilizing a Bézier path. Utilizing the Bézier path, the controlled vehicle is navigated from an initial point and velocity vector to a desired target waypoint and velocity vector. To ensure a flyable path, control points of the Bézier are adjusted using a nonlinear program that takes into account maximum path curvature and vehicle performance criteria. A model predictive controller is designed to provide the real-time controls that drive the controlled vehicle along the Bézier path with minimal flight path error and control effort. A numerical simulation, which demonstrates the ability to navigate to a desired waypoint and velocity vector for circular rejoin, is provided as an example.